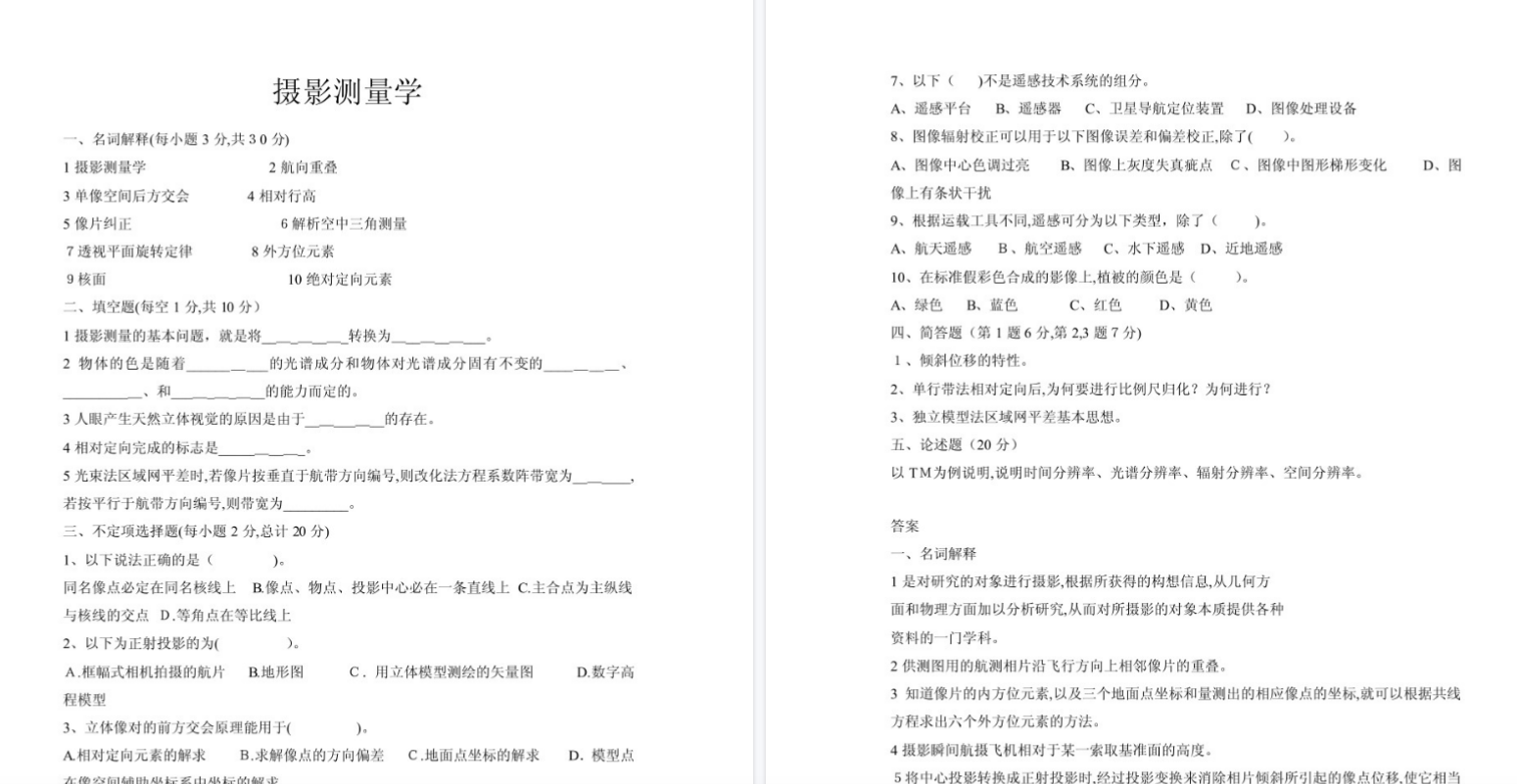
资料目录(截图原因可能偏模糊,实际都是高清版)

备考《摄影测量学》,最致命的误区是把它当成“测绘仪器学”或“数学公式汇编”——沉迷于背诵像片坐标、外方位元素、共线方程、相对定向绝对定向的公式推导,结果遇到“如何用无人机影像制作三维城市模型”这类实际问题时,只会罗列“空三加密、立体测图”几个词,却看不见摄影测量学的本质是从二维影像中恢复三维信息的几何科学。这门课的核心不是数学推演,而是重建现实世界的完整技术链。
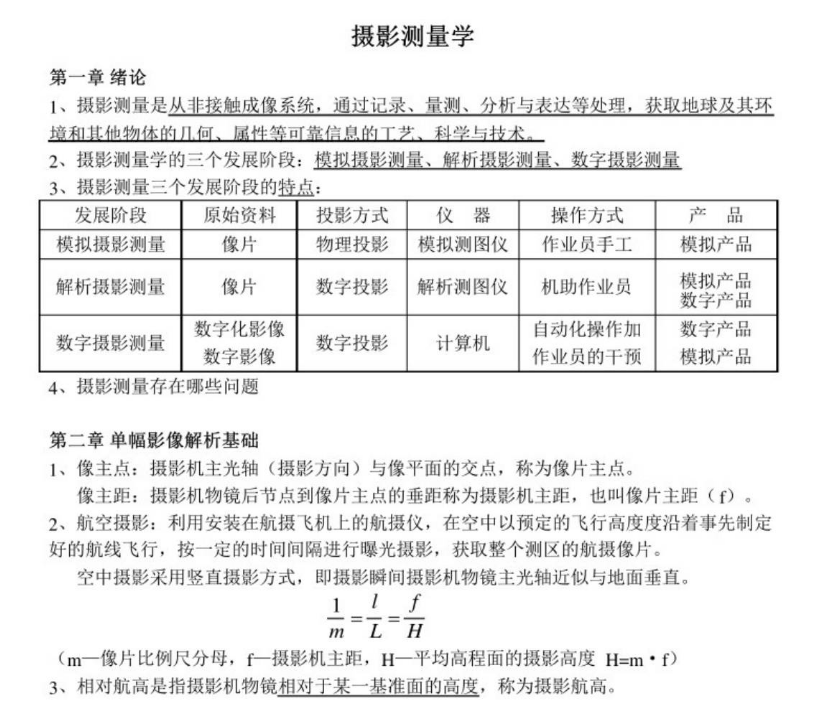
第一,以“共线方程”为逻辑原点重构知识体系。 这是摄影测量的灵魂。无论单像空间后方交会、双像立体测图还是解析空三,都是共线方程在不同条件下的解算。建议手绘一张“摄影测量技术流程图”,从影像获取、控制点测量、空中三角测量到立体测图、DOM/DEM/DSM生成,每一步挂载到共线方程这根主线上。
第二,死磕“内/外方位元素”和“像点与物点坐标转换”这个理论心脏。 这是贯穿全书的运算主线,也是无数考生只记公式、不懂物理意义的致命伤。要理解每个参数代表相机/影像在空间中的什么姿态。
第三,建立“自动化匹配”的现代意识。 从人工立体观测到数字影像匹配(相关系数、最小二乘、SIFT等),是摄影测量的范式革命。要理解匹配的原理、精度和可靠性。
第四,答题时呈现“三维重建者”的站位。 答案要体现你对几何精度来源的敏感、对误差传播的理解、对技术流程整体性的把握。
若资料存在问题或网盘链接失效,请联系本站客服QQ2484803760,每天工作时间:上午8点—晚上10点
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。